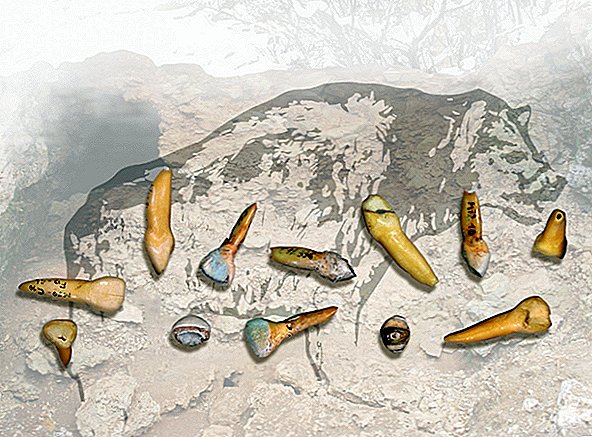
MicroBots planetários. Crédito da imagem: NASA Clique para ampliar
Entrevista com Penny Boston, Parte I
Se você deseja viajar para estrelas distantes ou encontrar vida em outro mundo, é preciso um pouco de planejamento. É por isso que a NASA criou o NIAC, o Instituto de Conceitos Avançados da NASA. Nos últimos anos, a NASA incentivou cientistas e engenheiros a pensar fora da caixa, a ter idéias exatamente desse lado da ficção científica. A esperança deles é que algumas dessas idéias se concretizem e forneçam à agência as tecnologias que ela pode usar 20, 30 ou 40 anos adiante.
O NIAC fornece financiamento de forma competitiva. Apenas um punhado das dezenas de propostas apresentadas é financiado. O financiamento da fase I é mínimo, apenas o suficiente para os pesquisadores desenvolverem sua idéia no papel. Se a idéia mostrar mérito, poderá receber financiamento da Fase II, permitindo que a pesquisa continue do conceito puro ao estágio de protótipo bruto.
Um dos projetos que recebeu financiamento da Fase II no início deste ano foi uma colaboração entre o Dr. Penelope Boston e o Dr. Steven Dubowsky no desenvolvimento de “micróbios de salto” capazes de explorar terrenos perigosos, incluindo cavernas subterrâneas. Se o projeto se concretizar, um dia os micróbios poderão ser enviados para procurar vida abaixo da superfície de Marte.
Boston passa muito tempo em cavernas, estudando os microorganismos que vivem lá. Ela é diretora do Programa de Estudos sobre Cavernas e Cársicos e professora associada da New Mexico Tech em Socorro, Novo México. Dubowsky é o diretor do Laboratório de Robótica de Campo e Espaço do MIT no MIT, em Cambridge, Massachusetts. Ele é conhecido em parte por sua pesquisa sobre músculos artificiais.
A Astrobiology Magazine entrevistou Boston logo depois que ela e Dubowsky receberam sua concessão da Fase II do NIAC. Esta é a primeira de uma entrevista em duas partes. Astrobiology Magazine (AM): Você e o Dr. Steven Dubowsky receberam recentemente financiamento do NIAC para trabalhar na idéia de usar robôs em miniatura para explorar cavernas subterrâneas em Marte? Como esse projeto surgiu?
Penny Boston (PB): Temos trabalhado bastante em cavernas na Terra com o objetivo de observar os habitantes microbianos desses ambientes únicos. Achamos que eles podem servir de modelo para procurar formas de vida em Marte e outros corpos extraterrestres. Publiquei um artigo em 1992, com Chris McKay e Michael Ivanov, sugerindo que o subsolo de Marte seria o último refúgio de vida naquele planeta, à medida que se tornasse mais frio e seco ao longo do tempo geológico. Isso nos levou a olhar para o subsolo na Terra. Quando o fizemos, descobrimos que há uma incrível variedade de organismos aparentemente indígenas da subsuperfície. Eles interagem com a mineralogia e produzem bioassinaturas únicas. Tornou-se uma área muito fértil para estudarmos.
Entrar em cavernas difíceis, mesmo neste planeta, não é fácil. Traduzir isso para missões extraterrestres robóticas requer alguma reflexão. Temos bons dados de imagem de Marte mostrando evidências geomorfológicas distintas para pelo menos cavernas de tubos de lava. Portanto, sabemos que Marte tem pelo menos esse tipo de caverna que poderia ser um alvo científico útil para futuras missões. É plausível pensar que também existem outros tipos de cavernas e temos um artigo publicado em um próximo artigo especial da Sociedade Geológica da América explorando mecanismos únicos de formação de cavernas (espeleogenéticas) em Marte. O grande ponto difícil é como se locomover em terrenos tão rigorosos e difíceis.
AM: Você pode descrever o que você fez na primeira fase do projeto?
PB: Na Fase I, queríamos focar em unidades robóticas pequenas, muito numerosas (portanto dispensáveis), amplamente autônomas e com a mobilidade necessária para entrar em terrenos acidentados. Com base no trabalho em andamento do Dr. Dubowsky com movimento robótico ativado por músculo artificial, surgiu a idéia de muitas, muitas e minúsculas esferas, do tamanho de bolas de tênis, que basicamente pulam, quase como saltos mexicanos. Eles armazenam energia muscular, por assim dizer, e depois se espalham em várias direções. É assim que eles se movem.
crédito: Renderização por R.D.Gus Frederick
Ambiente planetário para exploração planetária de superfície e subsuperfície em larga escala. Clique na imagem para ampliá-la.
Crédito de imagem: Render por R.D.Gus Frederick
Calculamos que provavelmente poderíamos reunir cerca de mil desses caras em uma massa de carga útil do tamanho de um dos MERs atuais (Mars Exploration Rovers). Isso nos daria flexibilidade para sofrer a perda de uma grande porcentagem das unidades e ainda ter uma rede que poderia estar realizando reconhecimento e detecção, geração de imagens e talvez até outras funções científicas.
AM: Como todas essas pequenas esferas se coordenam?
PB: Eles se comportam como um enxame. Eles se relacionam usando regras muito simples, mas isso produz uma grande flexibilidade em seu comportamento coletivo, o que lhes permite atender às demandas de terrenos imprevisíveis e perigosos. O produto final que estamos imaginando é uma frota desses carinha enviados para algum local de pouso promissor, saindo do lander e depois indo para algum subsolo ou outro terreno perigoso, onde eles se implantam como uma rede. Eles criam uma rede de comunicação celular, nó a nó.
AM: Eles são capazes de controlar a direção em que pulam?
PB: Temos aspirações para que eles sejam muito capazes. À medida que avançamos para a Fase II, estamos trabalhando com Fritz Printz, em Stanford, em células de combustível ultra-miniatura para alimentar esses pequenos, o que lhes permitiria fazer uma série de coisas bastante complexa. Um desses recursos é ter algum controle sobre a direção em que eles vão. Existem certas maneiras pelas quais eles podem ser construídos, permitindo que eles sigam preferencialmente uma direção ou outra. Não é tão preciso quanto seria se eles fossem rovers de rodas apenas seguindo um caminho reto. Mas eles podem preferencialmente não se ver mais ou menos na direção que desejam seguir. Então, estamos prevendo que eles terão pelo menos controle bruto sobre a direção. Mas muito do seu valor tem a ver com seu movimento de enxame como uma nuvem em expansão.
Por mais maravilhosos que sejam os rovers do MER, para o tipo de ciência que faço, preciso de algo mais parecido com a ideia de robô de inseto pioneira por Rodney Brooks no MIT. Ser capaz de explorar o modelo de inteligência de insetos e adaptação para exploração há muito me atraía. Acrescentando isso à mobilidade única proporcionada pela ideia de salto do Dr. Dubowsky, eu acho, pode permitir que uma porcentagem razoável dessas pequenas unidades sobreviva aos perigos do terreno subterrâneo - que me pareceu uma combinação mágica.
HB: Então, na Fase I, alguma delas realmente foi construída?
PB: Não. A Fase I, com o NIAC, é um estudo de seis meses de esforço cerebral e estocagem de lápis, para analisar o estado da arte das tecnologias relevantes. Na Fase II, faremos uma quantidade limitada de prototipagem e testes de campo, durante um período de dois anos. Isso é muito menor do que o necessário para uma missão real. Mas, é claro, esse é o mandato do NIAC, de examinar a tecnologia daqui a 10 a 40 anos. Acreditamos que isso provavelmente esteja entre 10 e 20 anos.
AM: Que tipos de sensores ou equipamentos científicos você imagina poder colocar nessas coisas?
PB: Imaginar é claramente algo que gostaríamos de fazer. À medida que as câmeras se tornam incrivelmente pequenas e robustas, já existem unidades na faixa de tamanho que podem ser montadas nessas coisas. Possivelmente, algumas das unidades podem estar equipadas com capacidade de ampliação, para que se possa observar as texturas dos materiais em que estão pousando. A integração de imagens captadas por pequenas câmeras em várias unidades pequenas é uma das áreas para desenvolvimento futuro. Isso está além do escopo deste projeto, mas é nisso que estamos pensando em imagens. E então, certamente sensores químicos, sendo capazes de cheirar e sentir o ambiente químico, o que é muito crítico. Tudo, desde pequenos narizes a laser até eletrodos íon-seletivos para gases.
Prevemos que eles não sejam todos idênticos, mas sim um conjunto, com o suficiente dos diferentes tipos de unidades equipadas com diferentes tipos de sensores, para que a probabilidade ainda seja alta, mesmo com perdas razoavelmente altas do número de unidades, para que possamos ainda teria um conjunto completo de sensores. Mesmo que cada unidade individual não possa ter uma carga gigantesca de sensores, você pode ter o suficiente para que ela possa sobrepor-se significativamente às suas outras unidades.
AM: Será possível fazer testes biológicos?
PB: Eu acho que sim. Especialmente se você imaginar o período de tempo que estamos analisando, com os avanços que estão chegando on-line com tudo, desde pontos quânticos a dispositivos lab-on-a-chip. Obviamente, a dificuldade é levar material de amostra para eles. Mas quando estamos lidando com pequenas unidades de contato com o solo, como nossos microbots de salto, você pode posicioná-los diretamente sobre o material que eles desejam testar. Em combinação com microscopia e imagens de campo mais amplo, acho que existe a capacidade de realizar algum trabalho biológico sério.
AM: Você tem uma idéia de quais são os marcos que espera alcançar durante seu projeto de dois anos?
PB: Prevemos que em março poderemos ter protótipos brutos com mobilidade relevante. Mas isso pode ser excessivamente ambicioso. Quando tivermos unidades móveis, nosso plano é fazer testes de campo em cavernas de tubos de lava reais nas quais estamos fazendo ciência no Novo México.
O site de campo já foi testado. Como parte da Fase I, o grupo do MIT surgiu e eu os ensinei um pouco sobre espeleologia e como era o terreno. Foi uma grande surpresa para eles. Uma coisa é projetar robôs para os corredores do MIT, mas outra é projetá-los para ambientes rochosos do mundo real. Foi uma experiência muito educacional para todos nós. Eu acho que eles têm uma boa idéia de quais são as condições que precisam para cumprir seu design.
AM: Quais são essas condições?
PB: Terreno extremamente irregular, muitas fendas nas quais esses caras podem ficar temporariamente presos. Portanto, precisaremos de modos de operação que lhes permitam se libertar, pelo menos com uma chance razoável de sucesso. Os desafios da comunicação de linha de visão em uma superfície altamente áspera. Superando grandes pedregulhos. Ficar preso em pequenas rachaduras. Coisas desse tipo.
A lava não é lisa. O interior dos tubos de lava é intrinsecamente liso depois que eles são formados, mas há muito material que encolhe, racha e cai. Portanto, existem pilhas de escombros para se movimentar repetidamente e muitas mudanças de elevação. E é isso que os robôs convencionais não têm capacidade de fazer.
Fonte original: NASA Astrobiology