Se você assistiu às imagens HiRISE de alta resolução do Mars Reconnaissance Orbiter ou teve a chance de explorar o novo Google Mars, sabe que Marte é repleto de crateras, montanhas, voçorocas e todo tipo de terreno interessante - e perigoso. . Áreas como essas com depósitos em camadas, sedimentos, fraturas e falhas são exatamente o tipo de lugar para procurar as fontes de metano que estão sendo produzidas em Marte. Mas é muito arriscado enviar nosso estilo atual de rovers, incluindo o Mars Science Laboratory (MSL) de 2011, para terrenos traiçoeiros. Mas os engenheiros da JPL, juntamente com os alunos do Instituto de Tecnologia da Califórnia, projetaram e testaram um robô versátil e de baixa massa que pode ser adicionado a veículos maiores, como o MSL, que podem rapel de falésias, viajar agilmente em terrenos íngremes e rochosos e explorar crateras profundas.
Esse protótipo, chamado Axel, pode ajudar futuras naves espaciais robóticas a explorar e investigar melhor mundos estrangeiros como Marte. Na Terra, Axel pode ajudar nas operações de busca e salvamento.
"Axel amplia nossa capacidade de explorar terrenos que não conseguimos explorar no passado, como crateras profundas com promontórios inclinados verticalmente", disse Issa A.D. Nesnas, pesquisadora principal da Axel, da seção de robótica e mobilidade do JPL. “Além disso, como o Axel é de massa relativamente baixa, uma missão pode levar vários rovers do Axel. Isso nos daria a oportunidade de sermos mais agressivos com o terreno que exploraríamos, mantendo o risco geral administrável. ”
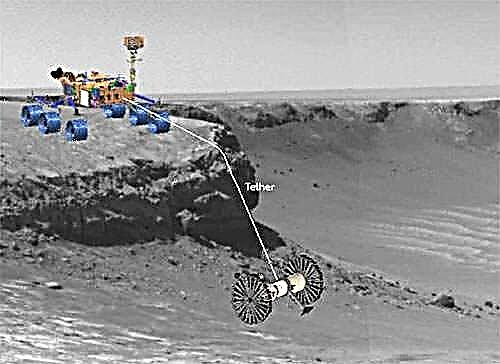
Nesnas disse que Axel é como um ioiô - está em uma corda presa a um veículo espacial maior e pode subir e descer os lados de crateras, gargantas e voçorocas, explorando regiões não seguras para outros veículos móveis.

O design simples e elegante do Axel, que pode operar de cabeça para baixo e do lado direito para cima, usa apenas três motores: um para controlar cada uma de suas duas rodas e um terceiro para controlar uma alavanca. A alavanca contém uma concha para coletar material lunar ou planetário para os cientistas estudarem e também ajusta as duas câmeras estéreo do robô, que podem inclinar 360 graus.

O corpo cilíndrico da Axel possui recursos de computação e comunicação sem fio e um sensor inercial para operar de forma autônoma. Também possui uma corda que o Axel pode desenrolar para descer de um lander, rover ou ponto de ancoragem maior. O rover pode usar diferentes tipos de rodas, desde grandes rodas dobráveis até infláveis, que ajudam o rover a tolerar um pouso forçado e a lidar com terrenos rochosos.
Axel está em desenvolvimento desde 1999, e estudantes da Caltech, Purdue University e Arkansas Tech University colaboraram com o JPL ao longo dos anos para desenvolver este rover versátil.
Para obter mais informações sobre o Axel, consulte a página do Axel do JPL e o site do Axel da Caltech.